「はやぶさ2」マーカーと「MINERVA-II2」がリュウグウの人工衛星に
【2019年10月29日 JAXA】
10月3日、探査機「はやぶさ2」は小惑星リュウグウでの最後のミッションとして、国内の大学連合チームが開発した小型ローバー「MINERVA-II2」の分離を行った。
まず分離に先立ち、「はやぶさ2」運用チームではリハーサルとして、リュウグウ着陸時に目印として使う「ターゲットマーカー」の残り3個のうち2個を分離する運用を9月12日から行った。
「はやぶさ2」は9月17日に高度1kmまで降下し、ここで2個のターゲットマーカーが、それぞれリュウグウの極方向と赤道方向に速度を与えて分離された。その後「はやぶさ2」は高度20kmのホームポジションまで上昇し、リュウグウを周回しながら落下するマーカーをカメラで撮影した。2個のマーカーはリュウグウを5周ほど周回した後、9月22日ごろにリュウグウ表面に着地した。

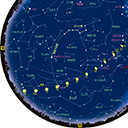
リュウグウの周りを周回する2個のターゲットマーカーを「はやぶさ2」の望遠カメラ(ONC-T)で撮影した合成画像。白い輝点がマーカーの像、青が極軌道に投入されたマーカー「TM-C(スプートニク)」、赤が赤道軌道に投入されたマーカー「TM-E(エクスプローラー)」の軌道を表す(提供:JAXA、千葉工大、産総研、立教大、東京大、高知大、名古屋大、明治大、会津大)
これまでに彗星や小惑星などの周りに人工物を周回させた事例としては、2000年にNASAの探査機「NEARシューメーカー」が小惑星エロスを約1年にわたって周回観測し、その後着陸させた例や、同じくNASAの探査機「ドーン」が2011年に小惑星ベスタ、2015年に準惑星ケレスの周回観測を連続して行った例がある。しかし、2つ以上の人工物を同時に周回軌道に投入する「衛星コンステレーション」を小天体で実現したのは今回の「はやぶさ2」のターゲットマーカーが世界初だ。さらに、地球外天体を周回する人工衛星としては史上最小となる物体でもある。
この成功を受けて運用チームでは、極軌道を周回したマーカー(TM-C)を「スプートニク (Спутник)」、赤道軌道を周回したマーカー(TM-E)を「エクスプローラー(Explorer)」と命名した。それぞれ、1957年にソ連が打ち上げた世界初の人工衛星「スプートニク1号」と1958年にアメリカが初めて打ち上げた人工衛星「エクスプローラー1号」にちなんでいる。
このリハーサルの結果を踏まえ、9月28日から「MINERVA-II2」の分離運用が行われた。「はやぶさ2」は10月3日0時57分(日本時間、探査機上時刻、以下同)に高度1kmまで降下し、ここで「MINERVA-II2」のローバー(Rover-2)を分離してから、高度8~10kmまで上昇してローバーの運動を観測した。ローバーはリュウグウの周りを1周と1/4ほど周回し、分離から約22時間後の10月3日23時10分ごろにリュウグウの表面に着地した。

「はやぶさ2」から分離された直後の「MINERVA-II2」を「はやぶさ2」の広角カメラ(ONC-W2)で撮影した連続画像(提供:JAXA、東北大・山形大・大阪大・東京電機大・東京理科大・九工大・千葉工大、産総研、立教大、東京大、高知大、名古屋大、明治大、会津大)
「MINERVA-II2」は機体の不具合によって、電源を使うホッピング移動機構や画像撮影などは行えない状況にあるが、「はやぶさ2」との通信は着地後も確立している。通信が確立する時間帯がリュウグウの自転周期(7.6時間)と一致していることから、リュウグウの表面にいることは確実で、着地地点が昼になると電源がオンになって「はやぶさ2」との通信がつながり、夜になると電源がオフになるという状況のようだ。

「MINERVA-II2」のローバーの通信状況。着地地点が昼のときに通信がオンになっているとみられる。画像クリックで拡大(提供:東北大学)
「MINERVA-II2」の開発・運用を行っている大学コンソーシアムでは、この成果を受けて、「MINERVA-II2」のRover-2を「ULULA(ウルラ)」と命名した。これはラテン語で「フクロウ」を意味する語であると同時に、"University-made Landing Unit for Locomotion on Asteroid"(大学が開発した小惑星上を移動する着陸機)の略称にもなっている。昨年9月に「はやぶさ2」から分離された「MINERVA-II1」の2機のローバーがそれぞれ「HIBOU(イブー、フランス語で「ミミズク」の意)」、「OWL(アウル、英語で「フクロウ」の意)」と命名されたのと合わせ、3機ともローマ神話の「ミネルヴァのフクロウ」にちなむ命名となった。
今回のターゲットマーカーと「MINERVA-II2」の軌道運動のデータや、「MINERVA-II2」から届く通信電波の強度を使った距離の推定データを組み合わせることで、リュウグウの重力場や内部の質量分布をより精密に求めることができると期待されている。
「はやぶさ2」プロジェクトマネージャーの津田雄一さんは、「MINERVA-II2の窮地を転じて成果に変える計画を素晴らしいチームワークで立案できたこと、それに応えてローバーも良く機能してくれたことは『はやぶさ2』のあり方を象徴しているようで大変感慨深く思います」とコメントしている。
「はやぶさ2」は10月末まで、高度を下げてリュウグウの観測を行う「BOX-C運用」を行い、11~12月にいよいよリュウグウを出発して地球への帰途につく予定だ。
小惑星探査機「はやぶさ2」の記者説明会(19/10/28)ライブ配信
(文:中野太郎)
関連記事
- 2025/04/14 AI技術でリュウグウとベンヌの全ての土砂を高速自動計測
- 2024/11/27 リュウグウの砂つぶに水の変遷史を示す塩の結晶を発見
- 2024/09/25 「はやぶさ2」が次に訪れる小惑星に「トリフネ」と命名
- 2024/09/12 「にがり」成分からわかった、リュウグウ母天体の鉱物と水の歴史
- 2024/08/09 「はやぶさ2」が次に訪れる小惑星は細長いかも
- 2024/07/18 リュウグウ試料から生命の材料分子を80種以上発見
- 2024/05/09 リュウグウの試料中に、初期太陽系の磁場を記録できる新組織を発見
- 2024/01/29 リュウグウに彗星の塵が衝突した痕跡を発見
- 2023/12/25 タンパク質構成アミノ酸が一部の天体グループだけに豊富に存在する理由
- 2023/12/15 リュウグウの岩石試料が始原的な隕石より黒いわけ
- 2023/12/13 「はやぶさ2♯」の目標天体2001 CC21命名キャンペーン
- 2023/12/07 リュウグウ試料が示す、生命材料の輸送経路
- 2023/11/15 リュウグウ試料に水循環で生じたクロム同位体不均質が存在
- 2023/10/03 リュウグウの見え方が宇宙と実験室で違う理由
- 2023/09/21 リュウグウ試料から始原的な塩と有機硫黄分子群を発見
- 2023/08/29 「はやぶさ2」の旅路から得られた、惑星間塵の分布情報
- 2023/07/26 「はやぶさ2」が次に目指す小惑星、イトカワと類似
- 2023/07/19 リュウグウの炭酸塩に、母天体が独特な環境で進化した形跡
- 2023/04/25 リュウグウ粒子に残る、穏やかな天体衝突の記録
- 2023/04/13 「はやぶさ2♯」探査目標の小惑星による恒星食、1地点で減光を観測










![[アストロアーツ かけはしプロジェクト:つなげよう日本 子供達の未来を守るために]](https://www.astroarts.co.jp/official/kakehashi/image/kakehashi_s.jpg)